Por norma general, los valores de PID que vienen por defecto en la controladora de vuelo (FC) funcionan bastante bien en la mayoría de drones y programas. Pero por el contrario si notas algún tipo de retraso, como que el drone sigue tus órdenes lentamente, entonces tendrás que variar los valores de PID, normalmente aumentándolos. Pero cuando este demasiado alto, es posible que notes vibraciones lentas cuando des gas al acelerador.
Índice
¿Qué es el término P del PID?
P es el valor principal, que determina la estabilidad y el manejo. En realidad, puede dejar los valores I y D en 0 y tu dron seguirá volando.
Cuanto mayor es la ganancia de P, más difícil es tratar de estabilizar el quad. En términos generales, una ganancia alta de P significa un control más nítido, mientras que una baja ganancia de P significa un control más suave. Pero si P es demasiado alto, el quad se vuelve demasiado sensible y se autocorrige “constantemente”. En ocasiones causará sobre rolls/picht y tendrá oscilaciones de alta frecuencia.
¿Qué es el término I del PID?
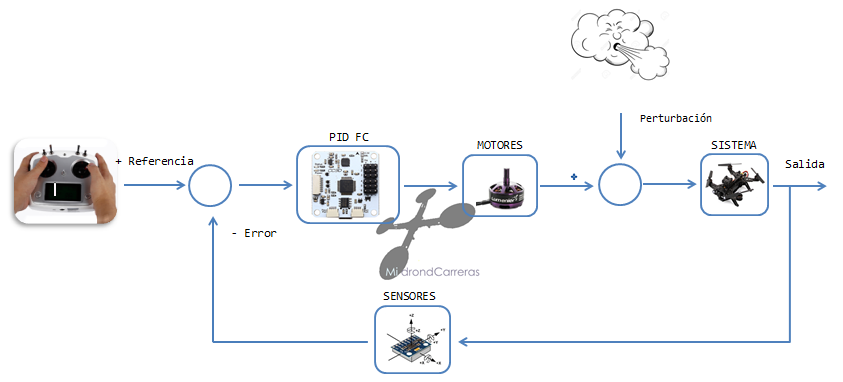
Muy simplemente, el término I ayuda a mantener la posición de tu dron según la referencia (por ejemplo, CG descentrado) y variables externas (por ejemplo, viento). Tu dron se notara más rígido con mayor ganancia.
Normalmente, la ganancia predeterminada funciona bastante bien en la mayoría del software y hardware moderno. Pero si notas que tu dron se desplaza ligeramente sin tocar, entonces aumente el término. Pero cuando este demasiado alto, es posible que notes vibraciones lentas en los punch-outs (golpe de acelerador).
¿Qué es el término D del PID?
La ganancia D es como lo opuesto a P. Si P es, imaginemos, la fuerza que se ejerce para seguir empujando al drone hacia una posición estable, entonces D es un muelle entre esa fuerza y el drone que absorbe los golpes bruscos. Al aumentar D, suaviza el movimiento al igual que un muelle elimina las vibraciones de los bache en los coches, es decir suaviza el empuje de la P.
Cuando empieces a tener unas vibraciones lentas aumentando el valor de P, no corras a bajarla. Intenta aumentar un poco más de D para ver si puede solucionarlo.
El aumento de D permite subir el valor de P, ya que reduce algunas de las vibraciones que el propio valor de P da, esto hará que tu drone de carreras tenga más “fuerza”, ya que recuerda que el valor de P es como la cantidad de fuerza que empuja a nuestro drone.
Si vas en Acro, notas ligeras oscilaciones, o te pasas al final de un giro, en pitch o roll, el aumentar la D también te ayudara a dejarlo “clavado” al final del roll. El término D también ayuda a reducir las oscilaciones de los propwash.
Sin embargo, demasiado D no es bueno porque amplifica el ruido en el sistema y causa oscilaciones en el tu drone y hace que los motores se sobrecalienten. Además, con un exceso de valor D, tu drone de carreras dejaría ser de carreras, ya que notaras que es lento y pesado.
¿Cómo mejorar las características del vuelo además del PID?
La Vibración
No todas las oscilaciones son causadas por un alto término P. Tienes que eliminar todas las fuentes de vibración o minimizarlas tanto como sea posible antes de ajustar PID.
Por ejemplo, equilibrar motores y hélices, rigidez del frame, brazos, etc. Con un drone sin vibraciones, puedes establecer una ganancia P mucho más alta y conseguirás que tu dron se mueva de forma muy estable.
Centro de gravedad (CG)
Muy, muy, muy importante, siempre tienes que conseguir que el centro de gravedad del drone esté justo en medio, justo donde se cruzan los brazos donde están colocados los motores, es importante que coloques bien la batería.
¿Qué pasa si el centro de gravedad no está bien configurado? Fácil, algunos motores tendrán que trabajar más que otros, ya que estarán todo el rato compensando el descentro de gravedad, por lo que no solo afectará al sobrecalentamiento de los motores, sino que también afectará la estabilidad.
Por ejemplo, en un drone, en el que su batería LiPo está demasiado atrás, desplaza el CG hacia atrás. Por lo que los 2 motores traseros tienen que funcionar al 70 % mientras que los motores frontales 2 solo están al 40% . Solo podrás aumentar el gas un 30%, ya que es el máximo del FC, y tus motores delanteros se quedaran al 70%, esto hará que tu drone pueda oscilar hacia adelante y hacia atrás y no darán el total de la potencia disponible porque los motores traseros ya han alcanzado el máximo.
Distribución de la masa
Los drones con masa más compacta y centrada tienden a sentirse más precisos, ágiles y rápidos. Cuando la masa está distribuida por el exterior del dron, hacia los brazos, se necesita más fuerza para rotarlo. También y debido a la masa angular y la inercia que esta genera al girar, hace que sea más difícil frenarlo en los giros.
Es por eso, que los frames en forma de X, se han apoderado del mercado de los drones de carreras en comparación a los drones en forma de. Además del diseño del marco, motores más ligeros y ESC también ayudan a reducir la inercia de rotación.
¿Cuándo tienes que volver ajustar los valores del PID?

- Casi todas las partes de su drone afectan en tu PID. Por lo tanto, cuando cambies componentes, incluso entre maracas diferentes, tienes que volver a ajustar los valores de PID.
- Además es conveniente que tengas diferentes PID, para cada tipo de vuelo, como por ejemplo. Si montas una cámara tipo GoPro el PID es totalmente diferente. Mirate este post para aprender como ajustarlos.
- Otra cosa importante que tienes que tener en cuanta, es el Looptime, disponible en Betaflight y Cleanflight. Este valor afecta muchísimo en el ajuste del PID, si cambias el Looptime tienes que cambiar el PID.







Recent Comments