Muchos programas de drones de carreras y no carreras como Betaflight, KISS, Cleanflight, Raceflight, LibrePilot etc, permiten a los usuarios ajustar los valores PID para mejorar el rendimiento del vuelo. En este post, explicaré qué es el control predictivo PID, cómo afecta la estabilidad del dron y, finalmente como se deben ajustar para que tu drone vuele como tú quieras.
En este post te explicare de forma sencilla y muy simple el funcionamiento del control PID, por lo que si quieres profundizar te recomiendo que sigas estos links. Traté de simplificar el concepto y explicarlo de una manera más práctica, para el uso y ajuste del PID en drones de carreras, pero si no entiendes bien los conceptos te aconsejo que te mires este post, donde explicó los términos del PID en líneas generales, sigue este link, seguro que te ayudara.
☝ ¿Qué es un control PID en un drone de carreras?
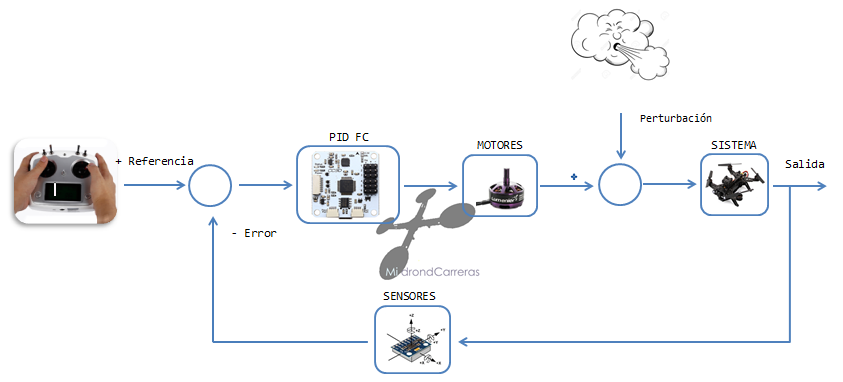
PID es una función matemática compleja que se incorpora en los controladores de vuelo (fligth controler o FC). Este control lee los datos de los sensores, como el giroscopio y les dice a los motores como tienen que actuar para mantener la estabilidad del drone, la velocidad del FC y los variadores será clave, ya que un control PID trabaja en bucles.
PID significa proporcional-integral-derivativo. El controlador PID es un sistema de control de bucle cerrado que intenta acercar el resultado real al resultado deseado ajustando la entrada. El error vuelve al comienzo y se repite el mismo proceso.
Hay 3 algoritmos en un controlador PID, como sus propias siglas dicen, son P de proporcional, I de integral y D de derivativo, cada una de ellas significa y afecta en parámetros diferentes del drone.
- P depende del error presente
- I en la acumulación de errores pasados
- D es una predicción de errores futuros basada en la cantidad de cambio que se está ejerciendo en ese mismo momento.
Explicación básica que hace un control PID en un quad
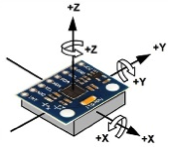 Primero la controladora de vuelo debe medir la velocidad angular del drone, es decir la velocidad de rotación de caja uno de los ejes X, Y y Z. Sabiendo cuál es la velocidad angular deseada, y a la que está en ese momento el drone, podemos estimar el error actual. Entonces podemos aplicar los 3 algoritmos de control al error, así obtendremos la salida adecuada hacia los motores que hará corregir ese error (posición).
Primero la controladora de vuelo debe medir la velocidad angular del drone, es decir la velocidad de rotación de caja uno de los ejes X, Y y Z. Sabiendo cuál es la velocidad angular deseada, y a la que está en ese momento el drone, podemos estimar el error actual. Entonces podemos aplicar los 3 algoritmos de control al error, así obtendremos la salida adecuada hacia los motores que hará corregir ese error (posición).
Esta es una explicación más o menos técnica de cómo funciona el controlador PID. En la práctica, cada uno de estos parámetros presenta efectos únicos en las características de vuelo y estabilidad de nuestro drone de carreras.
🚀 Que son los parámetros del control PID
Estos parámetros en realidad son números que podemos variar a nuestro antojo. Básicamente son solo los valores de cada uno de los controles por separado P-I-D. Estos coeficientes cambian la influencia de como actúa cada algoritmo sobre el error y este se ve reflejado en la salida. Aquí vamos a ver qué efectos tienen estos parámetros en un drone de carreras, aunque sirve para cualquier tipo de quad.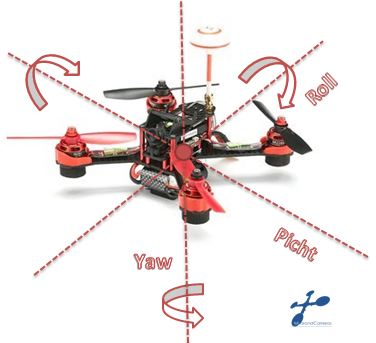
Un drone, al igual que un helicóptero, puede rotar sobre 3 ejes, y para cada eje hay un controlador PID dedicado. Esto significa que tendremos un total de 3 valores de PID por cada eje, Picht, Roll y Yaw, es decir 9 en total, aunque de Yaw solo se usen P e I.
Realmente no necesita comprender completamente cómo funciona el controlador PID para volar un drone, pero cuando quieres mejorar, sí que es recomendable saber que efecto produce cada uno de ellos, para así dejar tu drone de carreras perfectamente ajustado a tus necesidades de vuelo. Si estás interesado en la teoría aquí hay una explicación muy interesante del controlador PID con ejemplos. Este tutorial PID también es muy bueno y fácil de entender para principiantes.
El efecto de cada parámetro
En general, la alteración de los valores PID (ganancias) tiene el siguiente efecto en el comportamiento de un quad.
¿Qué ajusta la P, del PID?
Probablemente el valor más importante del PID, ya que el quad puede volar y estabilizarse con solo la ganancia P sin los otros 2 parámetros (I y D).
Este coeficiente determina la fuerza de la corrección. Cuanto más alto es el coeficiente, más sensible y más fuerte la forma en que reacciona al cambio angular. Si es demasiado bajo, nuestro dron de carreras parecerá ser más lento y blando, más difícil de mantenerse estable. Sin embargo, cuando la ganancia P es demasiado alta proporciona una corrección excesiva y genera oscilaciones.
¿Qué ajusta la I, del PID?
Este coeficiente influye en la precisión de la posición angular. Una ganancia mayor te ayudara en mantener la posición. Con baja ganancia, tu quad simplemente se alejará con el viento porque no mantendrá el ángulo.
En un ambiente perfecto, la ganancia I no sería necesaria. Sin embargo, el mundo real no es perfecto, hay muchas variables como CG en el drone, el viento y la propia gravedad.
Sin embargo, cuando el valor es demasiado alto, tu quad puede comenzar a sentirse rígido y no responde tan bien a tu stick. Es similar a tener una reacción más lenta y un efecto de disminución de la ganancia proporcional. En casos más extremos con un exceso de ganancia I, el drone incluso podría oscilar en una frecuencia más baja.
¿Qué ajusta la D, del PID?
La ganancia D funciona como un amortiguador y reduce las sobrerregulaciones y los excesos provocados por el término P. Hace que tu quad sea más suave y potencialmente también puede minimizar las oscilaciones del propwash.
Sin embargo, un valor D excesivo puede introducir vibración en tu dornter porque amplifica el ruido en el sistema. En el intento de hacer que tu quad se mueva con más suavidad, la FC indicará a los motores que giren más rápido o más despacio a una velocidad muy alta que el motor no puede mantener y puede causar sobrecalentamiento del motor.
Otro efecto secundario del término de una D alta es el aumento de latencia en el control y la reacción del drone.
Cómo ajustar las ganancias PID de un Dron de Carreras
Antes de empezar:
No existe una forma correcta o incorrecta de ajustar el PID, lo que sea que funcione para usted es el camino correcto.
- Siempre vuela en modo Acro, sin estabilización.
- Asegúrate de que el CG (centro de gravedad) de tu dron esté justo en el centro, el CG tiene un efecto significativo en lo bien que puede volar tu quad y lo rápido en ajustar.
Normalmente empiezo usando el PID predeterminado cuando afino mi quad, los valores de fábrica funcionan muy bien para la mayoría de las configuraciones desde el primer momento.
Vuelo un rato, con y sin FPV, noto cualquier comportamiento no deseado y luego ajusto el PID en consecuencia. Si el drone funciona mal con valores PID de fábrica, por ejemplo, muchas vibraciones, puedes intentar ajustar el PID desde valores bajos.
Simplemente disminuye a la mitad o más de todos los valores de PID para asegurarte de que definitivamente no sean demasiado altos para empezar.
Cada vez que ajusta el PID, debe preguntarse: «¿está mejorando o empeorando?» Encuentra el punto donde tenga las mejores características de vuelo antes de volver a descender.
Ajusto eje a eje, es decir, primero el pich, rolls y depues yaw. Y en cada eje, ajusto un valor a la vez, comienza con P, luego D, y finalmente I. Tendrás volver constantemente a ajustar los valores ya que un valor podría afectar la efectividad de otro.
Mi proceso de ajuste de PID
Para ajustar la P, comienzo primero con niveles bajos y los voy subiendo. El quad primero se siente lento, luego se vuelve más y más preciso y sigue muy bien el control de los sticks. Cuando la P es la correcta, se observan oscilaciones mínimas de propwash al hacer un giro brusco. Porque cuando P es demasiado baja, obtienes muchas oscilaciones lentas, y cuando se está es demasiado alta, comienzas a obtener oscilaciones más rápidas.
Ajústalo hasta que llegues a un punto en el que el quad se sienta muy receptivo y ágil, pero sin vibraciones. También escucha tus motores, la vibración de los motores es un signo de exceso de ganancia P que podría no ser visible en la cámara.
Ahora cuando haces maniobras agresivas como rolls y flips, probablemente notes algunos sobregiros al final del movimiento. Este es el momento de aumentar D gain.
Sin embargo, yo personalmente uso lo suficiente para eliminar la corrección excesiva, porque cuanto más D significa más latencia en el sistema, hace que tu quad no responda. Una correcta cantidad de D también arreglará o reducirá la propwash que tienes previamente.
Finalmente, ajusto el valor la ganancia I, de nuevo empiezas con un mínimo y aumentas lentamente. Vuela de izquierda a derecha con un ángulo determinado, comprueba que se mantiene el ángulo. Haz lo mismo para adelante y para atrás. Lo que buscas es que permanezca en la misma orientación. Otra buena prueba para hacer es hacer algunos pequeños punch y ver si el quad puede mantenerse nivelado.
Rate y Expo
Las rate y expo son tan importantes para el rendimiento y el control del vuelo de quad de carreras como los PID, ajustalos.
Qué es TPA
TPA es un ajuste para reducir la efectividad del PID a medida que aumenta el acelerador. Agrega suavidad a su vuelo en todo el rango de aceleración. Si tu quad vuela perfectamente bien con un acelerador más bajo, pero tiene una vibración a mayor aceleración, es posible que pueda repararlo con TPA.







Recent Comments