
Como calibrar el sensor de corriente de betaflight y no morir en el intento, es lo que os vamos a explicar en este post. Ya sabemos lo importante que es conocer la tensión de nuestras LiPos y más aún la tensión de cada celda, para que no baje de 3.7V, más aun es saber la corriente consumida, si no sabes de que te hablo, sigue este link, todo sobre las LiPos.
El sensor de corriente se usa en los drones para saber en tiempo real el consumo de corriente mAh y la carga que le queda en la batería, mediante el OSD o telemetría. En este post, explicaremos como calibrar en betaflight virtualmente y mediante el sensor de corriente y los beneficios que supone el uso del mismo.
Toda esta información la hemos recogido del repositorio de cleanflight.
Índice
Beneficios del sensor de corriente
La verdad que es muy útil conocer la cantidad de mAh que se ha utilizado en cada momento y hacerte una idea global del total de la capacidad de corriente.
- El consumo de la batería LiPo, betaflight lo transcribe en mAh, te informa directamente cuando tu batería está agotada. En mi humilde opinión, este es un indicador mucho mejor que el voltaje directo de la batería ya que cuando damos gas, la tensión disminuye drásticamente.
- Es un buen indicativo de si tu batería está mal y debería cambiarse, si el voltaje llega a 3.5V desde 4.2V, pero los mAh usados son solo el 30% de la capacidad total, entonces sabes que la batería es vieja.
- Puede comparar fácilmente el consumo de corriente de diferentes combinaciones de motor y hélice en vuelos reales
✍ Tipos de sensor de corriente en el Dron
Como sensor físico para drones existen dos tipos.
- Sensor de corriente incorporado en PDB o controlador de vuelo
- Sensor de corriente externo, conectado entre batería y el PDB.
- Virtualmente, no es un sensor pero funciona bien si se calibra.
Para los drones que “nosotros” usamos entre 135-250mm, no es recomendable el sensor de corriente externo, ya que es voluminoso y de gran tamaño. Probablemente sea más adecuado para construcciones más grandes como un 450.
Las Controladoras de Vuelo FC y PDB con sensor de corriente y OSD integrado, son cada vez más populares para construcciones ajustadas, como en las que estamos acostumbrados en los drones de carreras y micros.
☝¿Lecturas de Corriente Incorrectas en Betafligh?
Los sensores de corriente son útiles, sin embargo, a veces estos sensores de corriente no vienen calibrados de fábrica. Incluso 2 sensores de corriente idénticos podrían dar resultados ligeramente diferentes, por lo tanto, es importante que sepas cómo calibrarlos
Si los datos del sensor de corriente no son buenos, entonces no tiene sentido tener un activado un sensor de corriente en el OSD. Así que deberías calibrarlo.
Los sensores de corriente utilizan una ecuación simple para permitir a los usuarios ajustar y calibrar la salida, esta se hace mediante la ecuación de la pendiente de la recta.
y = ax + b
a es la escala en mV/10A y b es el offset en mA.
Es posible que diferentes FC necesiten diferentes valores de offset y escala, y esto es lo que hace necesaria la calibración del sensor. Afortunadamente, en la mayoría de los casos, no es necesario cambiar el offset y simplemente puedes dejarlo en el valor predeterminado, que es cero. Todo lo que necesitas cambiar normalmente es el parámetro de escala.
Si lo deseas puedes descargarte este archivo Excel que te ayudara en los cálculos. Archivo para el cálculo de calibración de corriente en betaflight
✅ Cómo calibrar el sensor de corriente en Betaflight
Aunque puede haber muchas formas de calibrar el sensor de corriente, existen 2 formas comunes de calibrar los sensores de corriente, te las resumo en los siguientes puntos.
Calibración mediante “prueba y error”
Esta, creo que es sin duda, la forma más sencilla de calibra los sensores de corriente a mi manera de ver. Es mucho más seguro y no requiere ningún equipo adicional. Sin embargo, puedes tardar un poco más de tiempo en hacerlo.
Básicamente, solo necesitas volar una batería, apunta el valor de mAh consumidos, estos son los que se ven en tu OSD. Luego, carga la batería y mira cuánta capacidad en mAh ha cargado. Usando esta fórmula puedes calcular la nueva escala de sensor actual:
nueva_escala = anterior_escala x (OSD_mAh_consumidos / mAh_cargados)
Es muy probable que tengas que repetir este proceso varias veces más, de esta manera obtendrás un resultado mucho más preciso.
Ten en cuenta que la escala actual en Betaflight funciona al revés, es decir, para que la lectura del sensor actual sea más baja, debe aumentar la escala.
Por ejemplo, si en el OSD estás leyendo un 10% más alto, necesitaras AUMENTAR la escala en un 10%, esto hará que el OSD lea un 10% más bajo.
Ejemplo calibración Prueba Error Betaflight:
Vuelas una batería con tu dron, y al final del vuelo, el OSD de Betaflight OSD te muestra 800mAh.
Cuando recarga la batería por completo, el cargador muestra que 710mAh, son los que cargo nuevamente en la batería
Ahora puedes calcular el nuevo valor de escala: Nueva escala = Anterior escala x (800/710)
Si la escala anterior era 300, la nueva escala sería 300 * 1.12 = 336
Y esto lo repites hasta que te canses.
🎯 Calibración mediante Tester o Amperímetro
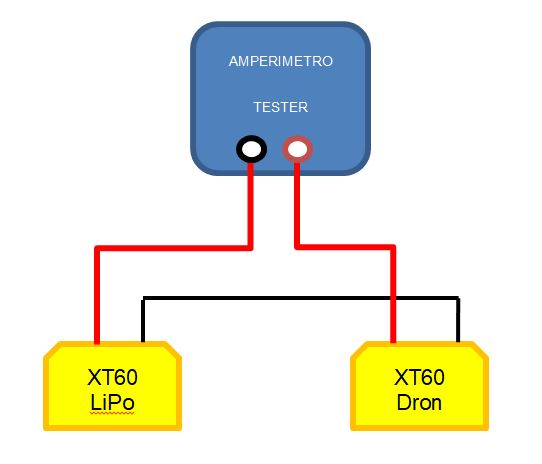
De esta forma puedes calcular de forma más rápida la escala y los valores del offset del sensor de corriente. Para ello, necesitaras varias cosas, como un tester o vatímetro y un cable de conexión entre el dron el tester y la LiPo.
Esta forma puede ser peligrosa, por lo tanto, hazlo bajo tu propio riesgo. Lo mejor es que quietes las hélices, conecta el medidor de corriente al dron para que pueda medir el consumo de corriente mientras actúas sobre los motores. A la derecha tienes el esquema de conexión.
Evidentemente usa la pestaña del motor en Betaflight para hacer girar los motores. Ves subiendo progresivamente, pero nunca te pases de la corriente máxima que soporta tu medidor, de lo contrario lo quemaras.

Compara los datos del tester con los datos del OSD.
Al principio notaras que hay un pequeño consumo de corriente cuando los motores están parados, eso es normal porque tu FC, RX, ESC, y Cámara están encendidos y consumiendo corriente.
Si la diferencia entre el tester y el OSD está dentro de 0.1A, puedes ignorarlo sin ningún tipo de problemas. Si la diferencia es mayor que 0.1A, puede ajustarla mediante el offset para que esté lo más cerca posible del medidor de corriente. Normalmente, el offset a 0 funciona bien para la mayoría de los sensores actuales.
Ahora enciende los motores y notaras un alto consumo de corriente. Apunta el valor que te está mostrando tu tester, 4A etc. Si obtienes un valor más alto o más bajo que el que muestra el OSD, debes ajustar la escala. Cámbielo en una pequeña proporción para ver cómo afecta en el resultado y después acaba de ajustarlo.




Por ejemplo;
Si tienes 18A en tu OSD, aumentas la escala en +50, y ahora obtienes 15A en el OSD, podemos calcular la proporción entre la corriente y la escala: (15-18) / 50 = -0.16A, para cada incremento de escala.
En este ejemplo aún estamos 3A más bajos que el valor esperado, por lo que sabemos que necesitamos bajar la escala en este ejemplo un poco más en 3 / -0.16 = -18.75.
⭐ Como calibrar el “Sensor” de corriente virtual Betaflight
El sensor de corriente virtual es una característica que incorpora Cleanflight y Betaflight. No requiere de ningún hardware ni sensor especial, ya que el consumo de la corriente se calcula mediante las variaciones del nivel del acelerador.
Puede ser una herramienta útil para tener activado en tu dron, ya que puedes saber la capacidad actual de corriente pero sin ningún sensor, no es 100% exacto, pero se aproxima mucho, solo por ello vale la pena.
Para este método necesitas saber tu throttle máximo Tmax, lo puedes saber ingresando en el CLI, get max_throttle. También tienes que saber la corriente minima Imin cuando el dron esta desarmado pero encendido y la corrente máxima Imax, cuando estás dando gas (throttle 100% del stick).
Una vez tienes estos datos solo hay que aplicar otra maravillosa formula.
Tmax = max_throttle-1000
amperage_meter_scale = (Imax – Imin) * 100000 / (Tmax + (Tmax * Tmax / 50))
amperage_meter_offset = Imin * 100
Sustituyes los valores y ya tendrías todos los datos para ingresar en el Betaflight
Por ejemplo, suponiendo una corriente máxima de 34.2A, una corriente mínima de 2.8A y un Tmax max_throttle = 1850:
amperage_meter_scale = (Imax – Imin) * 100000 / (Tmax + (Tmax * Tmax /50))
= (34.2 – 2.8) * 100000 / (850 + (850 * 850/50)) = 205
amperage_meter_offset = Imin * 100 = 280
Pues hasta aquí el aporte de hoy, espero que os haya gustado, si tenéis alguna duda podéis dejar los comentarios mas abajo.









Recent Comments